Menu
 Objectifs
Objectifs Introduction
Introduction Caractéristiques des moteurs Brushless
Caractéristiques des moteurs Brushless Exercice : Le dimensionnement d'une motorisation d'axe
Exercice : Le dimensionnement d'une motorisation d'axeLe dimensionnement d'une motorisation d'axe
Machine de fabrication de cartes à puce
NBS Technologies est une entreprise canadienne spécialisée dans le domaine du conditionnement des cartes à puce. Elle construit des machines modulaires capables de réaliser toutes les opérations de la fabrication d'une carte : fraisage de la cavité, encollage du module électronique, montage du module, marquage, gravure par matriçage, gravure laser, programmation personnalisée de la puce, ainsi que tous les contrôles qualité. La filiale française est située à Rousset dans la région Paca.
Cadence maximale : 5 000 cartes par heure
Temps de cycle minimal : 0,7 s
Capacité des magasins : 500 cartes chacun
Dimensions : 4,3 m × 1,15 m × 1,85 m
Prix ≈ 350 K€
Étude de la motorisation du transfert linéaire
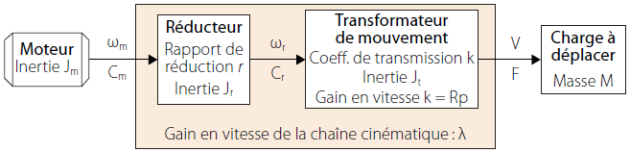
Le déplacement des cartes est assuré par un transfert linéaire à courroie crantée à taquets. Ce système est mû par un motoréducteur asservi entraînant en rotation une couronne triple dentée (poulie motrice). Cette couronne entraîne la courroie crantée principale qui porte les cartes entre ses taquets ainsi que deux courroies plus petites permettant d'amener les cartes du magasin vers le transfert linéaire proprement dit. La même structure se retrouve de l'autre côté, toutes les poulies étant folles.
Données :
Masse en translation (5 courroies + taquets + 32 cartes) : M = 1 kg maxi
Inertie des poulies (2 poulies dentées + 2 poulies lisses) : Jt = 8 × 10 – 3 kg·m2
Rayon des poulies dentées : Rp = 0,065 m
Efforts résistants dus aux frottements sur la courroie < 10 N
Rendement de la chaîne cinématique (poulie courroie + réducteur à faible jeu) : η = 0,8
Choix technico-économiques préalables :
Fournisseur du moteur, du réducteur et du variateur : Parvex
Type de moteur choisi : moteur brushless
Carte de commande avec lois trapèze à sinus carré
Chaîne cinématique non modifiable

 Ensemble moteur - réducteur - poulies | Objectifs de déplacement pour la charge
|
Question
Indiquez quels sont les critères mécaniques qui on amenés au choix d'un moteur brushless pour cette application.
Aidez-vous du chapitre traitant des Caractéristiques des moteurs brushless
Analysez les objectifs de déplacement pour la charge
La faible inertie des moteurs brushless ainsi que la possibilité de pouvoir les surcharger temporairement (accélération maximale de 13 m/s²) les rendent particulièrement adaptés à cet usage.
Question
Indiquez dans quelle technologie de moteurs brushless cette propriété est particulièrement vraie.
Aidez vous du Chapitre traitant des Différents types de moteur brushless.
Moteurs brushless inrunner
Contrairement aux moteurs brushless outrunners, ils ont le rotor à l'intérieur du stator.
L'inertie du rotor est donc beaucoup plus faible que pour un moteur outrunner, et les vitesses atteintes par ce type de moteur sont beaucoup plus élevées.
Question


Question



Nous nous orientons vers les plus petits modèles de moteurs brushless Parvex, la gamme correspondante étant repérée NX, avec des puissances commençant à 200 W. L'extrait de documentation donne les caractéristiques pour les moteurs les moins puissants. Tous les moteurs sont capables d'atteindre la vitesse de 4000 tr/min. | 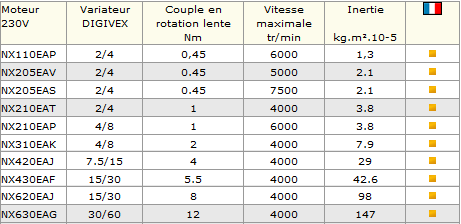 |

Question




Question

Question
La gamme de réducteurs Parvex à faible jeu GX offre des rapports de réduction échelonnés de 5 en 5. Choisissez le coefficient de réduction qui convient le mieux. | 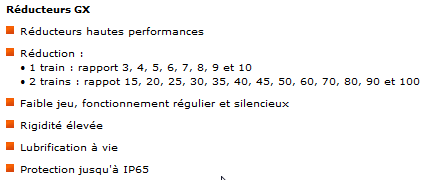 Réducteurs GX |
Coefficient de réduction qui convient le mieux
On choisit le coefficient de réduction le plus proche, soit r = 40
Question





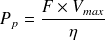
Couples moteur nécessaires
Les calculs des différents couples donnent les résultats suivants :
Couple d'accélération : 0,061 Nm
Couple permanent : 0,002 Nm
Couple crête : 0,061 + 0,002 = 0,063 Nm
Question
Sélectionnez le moteur qui convient à cette application.
Donnez ses caractéristiques principales.
Sélection du moteur
Les plus petits modèles dans l'extrait de documentation présenté en sont déjà trop puissants. On sélectionne le moteur NX110EAP :
| 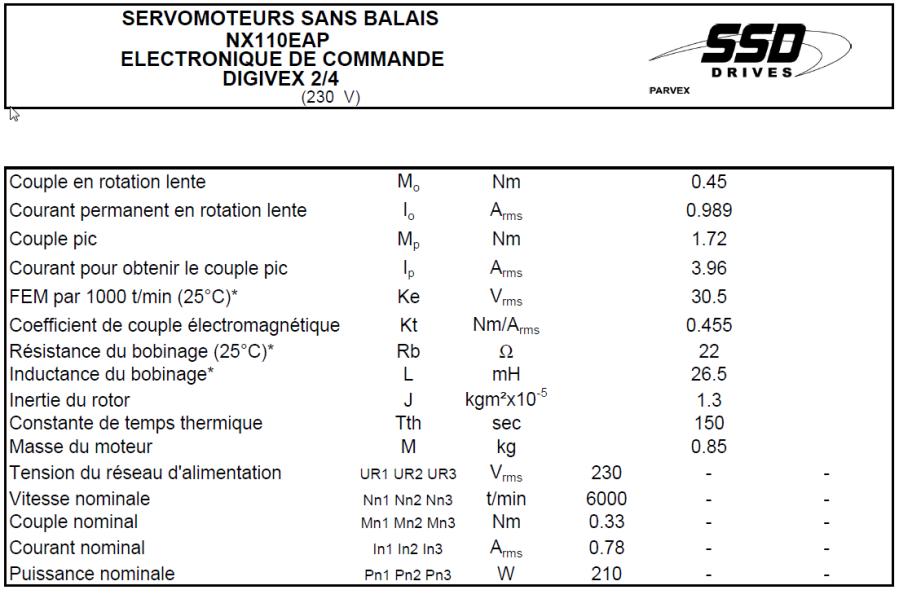 |