Menu
 Moteur à excitation indépendante
Moteur à excitation indépendanteMoteur à excitation indépendante
Il faut deux alimentations : une pour l'inducteur et l'autre pour l'induit. Les quatre grandeurs qui déterminent le fonctionnement du moteur sont : E,U, I et Φ. |  Schéma équivalent du moteur à excitation indépendante |
Vitesse de rotation
Le sens de rotation dépend :
du sens du flux, donc du sens du courant d'excitation Ie ;
du sens du courant d'induit I.
Expression de la vitesse : E = KΦΩ = U − RI :
![]()
Démarrage du moteur
Surintensité de démarrage (exemple)
Soient :
Tdc le couple de démarrage imposé par la charge (N.m);
Td le couple de démarrage du moteur (N.m);
Id le courant de démarrage (A);
Au démarrage : Ω = 0 ⇒ E = 0 et donc :
Exemple :
Un =240 V la tension d'alimentation nominale de l'induit ;
In = 20 A le courant nominal dans l'induit ;
R=1 Ω la résistance de l'induit
Attention : Conséquences
La pointe de courant de 240 A va provoquer la détérioration de l'induit par échauffement excessif par effet joule.
Il faut limiter le courant de démarrage : en général on accepte Id = 1 , 5 In
Conseil : Solutions pour limiter le courant
Solution 1 : on utilise des rhéostats de démarrage. Cette solution est peu économique.
Solution 2 : on utilise des démarreurs ou variateurs de vitesse.

Fonctionnement à vide
A vide la seule puissance absorbée sert à compenser les pertes. La puissance utile est nulle.
La vitesse à vide se règle en fonction de la tension d'alimentation ou du flux inducteur Φ.
![]()
Attention : Phénomène d'emballement
A vide, il ne faut jamais supprimer le courant d'excitation Ie lorsque l'induit est sous tension, car le moteur peut s'emballer.
En effet si Ie → 0 alors Φ → 0 et Ω0 → ∞.
Fonctionnement à flux constant
La caractéristique passe approximativement par zéro. |  Caractéristique vitesse = f(U) |
Fonctionnement en charge
Exprimons la vitesse de rotation en fonction de la tension d'alimentation :
 Couple en fonction de la vitesse | La vitesse dépend de :
U reste tout de même grand devant R.I. En conséquence la vitesse de rotation est essentiellement fixée par la tension d'alimentation U et varie très peut en fonction du courant, c'est-à-dire de la charge. |
Remarque : Mode de fonctionnement usuel
L'alimentation de l'induit sous tension réglable présente deux avantages :
mise en vitesse progressive avec suppression de la surintensité ;
vitesse largement variable.
C'est le mode de fonctionnement utilisé lorsque la vitesse doit varier.
Conclusion
Fondamental :
La tension d'alimentation impose la vitesse de rotation

La charge impose la valeur du courant I

Point de fonctionnement
Une charge oppose au moteur un couple résistant Tr. Pour que le moteur puisse entraîner cette charge, le moteur doit fournir un couple utile Tu de telle sorte que :
Cette équation détermine le point de fonctionnement du moteur. | 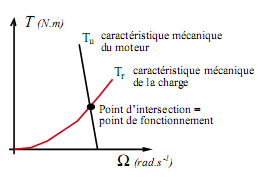 Point de fonctionnement |
Bilan énergétique
Soient :
| 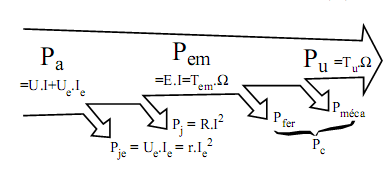 Bilan énergétique |
Remarque :
• Toute l'énergie absorbée à l'inducteur et dissipée par effet joule. On peut omettre l'inducteur dans le bilan des puissances et alors Pje n'apparaît pas et Pa=U.I.
• Les pertes fer et les pertes mécaniques sont rarement dissociées, la somme étant les pertes constantes Pc.
• Si le moteur est à aimants permanents, Ue, Ie et Pje n'existent pas.
Emploi
Ce moteur est caractérisé par une vitesse réglable par tension et indépendante de la charge.
En association avec un convertisseur statique (hacheur) fournissant une tension réglable, la vitesse peut varier sur un large domaine.
Il fournit un couple important à faible vitesse (machines-outils, levage).
En petite puissance, il est souvent utilisé en asservissement avec une régulation de vitesse.